Giao thức CAN là gì? đặc điểm và ứng dụng của CAN trong công nghiệp Oto
Nội dung chính [Hiện]
Giao thức CAN (Controller Area Network) là một trong những giao thức truyền thông được sử dụng rộng rãi trong các hệ thống điện tử và điều khiển trong ô tô, xe máy, các thiết bị công nghiệp và nhiều ứng dụng khác. Với tốc độ truyền dữ liệu nhanh, tính ổn định và khả năng kết nối đa chủ, CAN đã trở thành một trong những giao thức truyền thông phổ biến nhất hiện nay.
Trong bối cảnh các hệ thống điện tử và điều khiển ngày càng phức tạp và đa dạng, sự cần thiết của các hệ thống truyền thông tin đang trở nên ngày càng quan trọng. Giao thức CAN đã được phát triển để đáp ứng nhu cầu truyền thông trong các hệ thống này. Với cách thức truyền thông đa chủ, khả năng truyền dữ liệu từ xa (RTR) và sự chính xác, CAN đã được ứng dụng rộng rãi trong nhiều lĩnh vực và giúp tối ưu hóa hoạt động của các hệ thống điện tử và điều khiển.
Xem thêm: IoT là gì? lịch sử phát triển, nguyên lý hoạt động và ứng dụng của IoT trong thực tế
Bên cạnh các chuẩn truyền thông vật lý thông thường như RS232, RS485, Ethernet,...hay các giao thức truyền thông như Modbus RTU, Modbus TCP....đang được sử dụng rộng rãi trong nhiều ngành nghề, lĩnh vực. Trong đó có một giao thức mà ít người biết đến chính là giao thức CAN và là một giao thức được sử dụng phổ biến trong ngành sản xuất ô tô cũng như trong một số ngành công nghiệp khác.
Giao thức CAN là gì?
Giao thức CAN (Controller Area Network) là một giao thức truyền thông được sử dụng trong các hệ thống điều khiển và mạng xe hơi. Nó được phát triển bởi Bosch vào những năm 1980 và đã trở thành tiêu chuẩn trong các ứng dụng xe hơi, như hệ thống khung xe, hệ thống động cơ, hệ thống treo và hệ thống điều hòa.
CAN cho phép các nút trong một mạng liên lạc với nhau mà không cần một bộ điều khiển trung tâm. Thay vì đó, các nút trong mạng đóng vai trò như các bộ điều khiển, chuyển tiếp các tin nhắn giữa các nút khác nhau trong mạng. Mỗi tin nhắn có địa chỉ và ưu tiên khác nhau, và các nút chỉ phản hồi với các tin nhắn mà họ được yêu cầu.
Các ứng dụng của CAN không chỉ giới hạn trong các hệ thống xe hơi, mà còn được sử dụng trong các lĩnh vực khác như công nghiệp, điện tử, y tế và nhiều lĩnh vực khác. Các ứng dụng CAN cũng đã được mở rộng với các phiên bản mới như CAN-FD (Flexible Data Rate) và CAN-FD ISO, cung cấp khả năng truyền dữ liệu cao hơn và tốc độ truyền nhanh hơn.
Giao thức CAN được ứng dụng như thế nào
Giao thức CAN (Controller Area Network) được ứng dụng rộng rãi trong các hệ thống điện tử và mạng liên lạc trong nhiều lĩnh vực khác nhau. Dưới đây là một số ứng dụng phổ biến của giao thức CAN:
-
Hệ thống xe hơi: CAN là một tiêu chuẩn trong các hệ thống điều khiển xe hơi, từ hệ thống động cơ và hộp số đến hệ thống treo và điều hòa. Nó cho phép các bộ phận trong xe hơi giao tiếp với nhau một cách hiệu quả hơn, giảm thiểu sự cố và tăng tính an toàn và hiệu suất của xe hơi.
-
Công nghiệp: CAN được sử dụng trong các hệ thống điều khiển và mạng liên lạc trong các ứng dụng công nghiệp, bao gồm hệ thống điều khiển nhiệt độ, hệ thống đo lường và kiểm soát, hệ thống tự động hóa và hệ thống bảo mật.
-
Y tế: CAN được sử dụng trong các thiết bị y tế để kết nối các bộ phận trong các thiết bị y tế khác nhau, giúp cải thiện tính an toàn và hiệu quả của các thiết bị y tế.
-
Môi trường: CAN được sử dụng trong các hệ thống đo lường môi trường để giám sát chất lượng không khí, nước và đất.
-
Tàu thủy: CAN được sử dụng trong các hệ thống điều khiển và mạng liên lạc trên tàu thủy, bao gồm các hệ thống an toàn và hiệu suất, hệ thống đo lường và kiểm soát, và các hệ thống tự động hóa.
-
Hàng không: CAN được sử dụng trong các hệ thống điều khiển và mạng liên lạc trên các máy bay, bao gồm các hệ thống an toàn và hiệu suất, hệ thống đo lường và kiểm soát, và các hệ thống tự động hóa.
Ứng dụng của giao thức CAN không chỉ giới hạn trong các lĩnh vực đã đề cập, mà còn được sử dụng rộng rãi trong nhiều lĩnh vực khác, giúp cải thiện hiệu suất và tính an toàn của hệ thống điện tử và mạng liên lạc.
Giao thức CAN hoạt động trên một đường truyền topo bus và chỉ sử dụng hai dây để truyền thông tin. Tính năng đa chủ của bus cho phép mỗi thiết bị trên bus có thể gửi hoặc nhận dữ liệu. Tuy nhiên, chỉ có một thiết bị có thể gửi dữ liệu vào một thời điểm và tất cả các thiết bị khác phải lắng nghe. Nếu nhiều thiết bị cố gắng gửi dữ liệu cùng một lúc, thiết bị có độ ưu tiên cao nhất được phép gửi dữ liệu của nó, trong khi các thiết bị khác phải chuyển sang chế độ nhận.
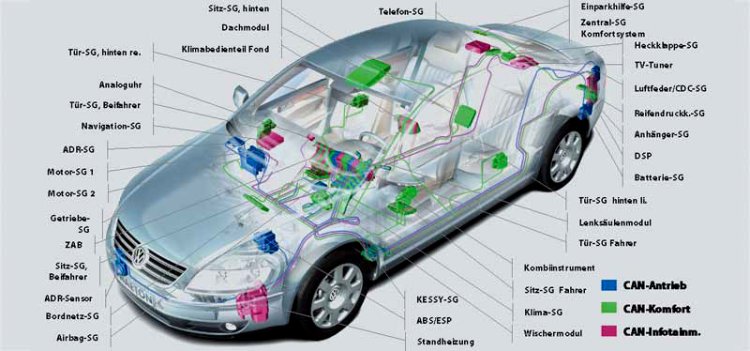
Trong các ứng dụng xe điển hình, có nhiều hơn một bus CAN với tốc độ khác nhau. Những thiết bị có tốc độ truyền dẫn thấp hơn, chẳng hạn như điều khiển cửa, điều hòa và các mô-đun điều khiển thông tin, có thể được kết nối với bus có tốc độ chậm. Trong khi đó, các thiết bị đòi hỏi đáp ứng nhanh hơn, như hệ thống chống bó cứng phanh ABS, các mô-đun điều khiển truyền dẫn và các mô-đun điều khiển động cơ điện tử, được kết nối với bus CAN có tốc độ cao hơn.
Ứng dụng CAN trong các lĩnh vực khác cũng tương tự với việc kết nối các thiết bị vào một mạng liên lạc CAN để tăng tính an toàn, hiệu suất và đáp ứng của hệ thống.
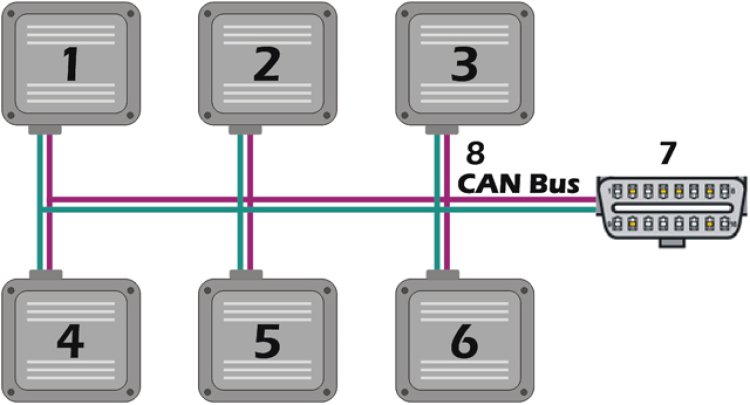
Hình ảnh trên mô tả một mạng bus CAN với ba nút. Giao thức CAN dựa trên giao thức CSMA/CD+AMP (Carrier-Sense Multiple Access: Đa truy cập có tránh xung đột / Collision Detection Arbitration on Message Priority: Giám sát phát hiện xung đột dựa trên thông điệp ưu tiên), tương tự như các giao thức được sử dụng trong mạng Ethernet LAN.
Trong mạng Ethernet, khi phát hiện xung đột, các nút đang gửi dữ liệu sẽ dừng truyền và đợi một khoảng thời gian ngẫu nhiên trước khi cố gắng gửi lại. Tuy nhiên, đối với giao thức CAN, các vấn đề xung đột được giải quyết bằng cách sử dụng các nguyên tắc của trọng tài, trong đó chỉ các nút ưu tiên cao nhất được cho phép gửi dữ liệu. Điều này đồng nghĩa rằng trong mạng bus CAN, chỉ có một thiết bị có độ ưu tiên cao nhất được phép gửi dữ liệu của nó trong một thời điểm, đồng thời các thiết bị khác sẽ dừng truyền và chuyển sang chế độ nhận.
Giao thức CAN cũng cho phép có nhiều hơn một bus CAN trong cùng một ứng dụng xe điển hình, với tốc độ truyền thông khác nhau. Những thiết bị có tốc độ truyền thông chậm, chẳng hạn như điều khiển cửa, điều hòa và các mô-đun điều khiển thông tin, có thể được kết nối với bus CAN chậm. Trong khi đó, các thiết bị đòi hỏi đáp ứng nhanh hơn, như hệ thống chống bó cứng phanh ABS, các mô-đun điều khiển truyền dẫn và các mô-đun điều khiển động cơ điện tử, được kết nối với bus CAN nhanh hơn.
Giao thức CAN có mấy loại
Giao thức CAN chia thành hai loại chính là CAN 2.0 và CAN FD (Flexible Data Rate).
CAN 2.0 là phiên bản gốc của giao thức CAN, được giới thiệu vào năm 1986. Nó hỗ trợ tốc độ truyền dữ liệu lên đến 1 Mbps và được sử dụng phổ biến trong các ứng dụng ô tô, máy móc công nghiệp và thiết bị y tế.
CAN FD là một phiên bản tiên tiến hơn của CAN 2.0, cho phép tốc độ truyền dữ liệu nhanh hơn và dung lượng dữ liệu lớn hơn. Nó được giới thiệu vào năm 2011 và có thể hỗ trợ tốc độ truyền dữ liệu lên đến 8 Mbps và dung lượng dữ liệu lên đến 64 byte trong một khung tin nhắn. CAN FD đang trở nên ngày càng phổ biến trong các ứng dụng yêu cầu tốc độ và dung lượng dữ liệu cao như trong ngành công nghiệp ô tô, robot, máy móc tự động hóa, và các thiết bị IoT.
Các tính năng của giao thức CAN
Giao thức Controller Area Network (CAN) là một giao thức mạng được sử dụng trong các ứng dụng công nghiệp và xe hơi để truyền tải dữ liệu giữa các thiết bị. Giao thức này có nhiều tính năng quan trọng, bao gồm:
-
Khả năng truyền dữ liệu nhanh và đáng tin cậy: Giao thức CAN cho phép truyền dữ liệu ở tốc độ cao lên đến 1 Mbps, đồng thời đảm bảo tính tin cậy trong quá trình truyền.
-
Khả năng kết nối nhiều thiết bị trên cùng một mạng: Giao thức CAN cho phép kết nối nhiều thiết bị trên cùng một mạng, từ đó giảm thiểu chi phí và tăng tính linh hoạt cho hệ thống.
-
Khả năng phát hiện và sửa chữa lỗi truyền thông tự động: Giao thức CAN có khả năng phát hiện và sửa chữa lỗi truyền thông tự động, giảm thiểu thời gian và chi phí bảo trì của hệ thống.
-
Khả năng truyền dữ liệu theo thời gian thực và đồng bộ: Giao thức CAN cho phép truyền dữ liệu theo thời gian thực và đồng bộ giữa các thiết bị trên cùng một mạng, đáp ứng yêu cầu của nhiều ứng dụng trong công nghiệp.
-
Khả năng giảm thiểu số lượng dây kết nối cần thiết: Giao thức CAN giảm thiểu số lượng dây kết nối cần thiết, từ đó giảm chi phí và tăng tính linh hoạt của hệ thống.
-
Khả năng truyền thông toàn cầu: Giao thức CAN cho phép truyền tải dữ liệu giữa các thiết bị ở các vị trí khác nhau trên toàn thế giới, đáp ứng yêu cầu của các ứng dụng có quy mô lớn.
-
Khả năng phân cấp và ưu tiên: Giao thức CAN có khả năng phân cấp và ưu tiên, cho phép thiết bị quan trọng được ưu tiên hơn trong quá trình truyền tải dữ liệu.
Giao thức CAN có nhiều tính năng quan trọng, đáp ứng yêu cầu của nhiều ứng dụng trong công nghiệp và xe hơi, từ đó giúp tăng tính linh hoạt, độ tin
Hệ thống Bus CAN là một hệ thống đa chủ, có nghĩa là mỗi thiết bị kết nối trên bus có khả năng truyền và nhận dữ liệu. Điều này cho phép nhiều thiết bị truyền thông với nhau một cách đồng thời trên cùng một bus, giúp tối ưu hóa tốc độ truyền dữ liệu và giảm thiểu sự cố kết nối. Trong một hệ thống Bus CAN đa chủ, mỗi thiết bị trên bus có khả năng truyền dữ liệu lên bus và các thiết bị khác có thể nhận và giải mã các thông điệp đó. Ngoài ra, mỗi thiết bị cũng có khả năng phát hiện và khắc phục các lỗi kết nối, đảm bảo tính ổn định và tin cậy của hệ thống. Việc thiết kế hệ thống Bus CAN đa chủ cũng giúp tối ưu hóa tốc độ truyền dữ liệu trên bus, đồng thời giảm thiểu tải trên mỗi thiết bị trên bus, làm tăng khả năng xử lý dữ liệu và đáp ứng được các yêu cầu truyền thông của các ứng dụng khác nhau.
Hệ thống Bus CAN có thể truyền một thông điệp duy nhất cho một nút cụ thể hoặc nhiều nút khác nhau, tùy thuộc vào cách thiết kế của hệ thống. Một ưu điểm của việc không có địa chỉ là khi một thiết bị được thêm vào hoặc lấy đi khỏi bus, không cần thay đổi cấu hình dữ liệu (nghĩa là, bus có thể gắn nóng).
Tính năng truyền tải từ xa (RTR) là một trong các tính năng của giao thức truyền thông Bus CAN. Khi một nút trên bus yêu cầu thông tin từ một nút khác trên bus, nó có thể sử dụng tính năng RTR để gửi một yêu cầu truyền tải từ xa. Khi nhận được yêu cầu RTR, nút nhận sẽ trả về một khung dữ liệu có chiều dài là 0 byte, chứa thông tin về loại thông điệp cần truyền. Sau khi nhận được khung dữ liệu này, nút yêu cầu có thể gửi dữ liệu thực sự đến nút nhận bằng cách sử dụng các khung dữ liệu CAN thông thường. Tính năng RTR cho phép các nút trên bus yêu cầu thông tin mà không cần phải chờ đợi cho đến khi thông tin thực sự được truyền tải. Điều này giúp tối ưu hóa thời gian phản hồi và giảm thiểu tải trên bus. Ngoài ra, tính năng RTR cũng giúp đảm bảo tính tin cậy của hệ thống truyền thông CAN bằng cách cho phép các nút kiểm tra trạng thái của các nút khác trên bus trước khi truyền dữ liệu.
Trong hệ thống CAN bus, số lượng thiết bị kết nối trên một bus bị giới hạn bởi thời gian trễ của bus và tải điện của các thiết bị đó. Điều này có nghĩa là khi số lượng thiết bị trên bus tăng lên, thời gian truyền dữ liệu trên bus sẽ tăng và ảnh hưởng đến tốc độ truyền dữ liệu trên mỗi thiết bị. Thêm vào đó, các dữ liệu trên bus CAN là không chính xác và có thể ở hai trạng thái: dominant và recessive. Trạng thái dominant được đại diện bởi mức điện thấp trên bus, trong khi trạng thái recessive được đại diện bởi mức điện cao trên bus. Các thiết bị trên bus phải có khả năng phát hiện và giải mã đúng các trạng thái này để truyền và nhận dữ liệu đúng cách.
Tiêu chuẩn ISO-11898 là tiêu chuẩn về giao thức truyền thông CAN bus. Đây là tiêu chuẩn quan trọng được sử dụng rộng rãi trong ngành công nghiệp ô tô và các ngành công nghiệp khác. Tiêu chuẩn này định nghĩa các yêu cầu về cấu trúc phần cứng và phần mềm của giao thức CAN bus, bao gồm các thông số kỹ thuật về tốc độ truyền dữ liệu, độ dài bus, số lượng nút trên bus và các yêu cầu về điện áp và thời gian truyền dữ liệu. Ngoài ra, tiêu chuẩn ISO-11898 cũng đưa ra các quy định về các thông điệp truyền tải trên bus, bao gồm cấu trúc và định dạng của các trường thông điệp và các mã lỗi. Việc tuân thủ tiêu chuẩn ISO-11898 giúp đảm bảo tính tương thích và đáng tin cậy của các thiết bị được kết nối trên CAN bus, đồng thời giảm thiểu rủi ro và sự cố trong quá trình truyền thông dữ liệu.
Lời kết
Tóm lại, giao thức Controller Area Network (CAN) là một trong những giao thức truyền thông quan trọng trong các hệ thống điện tử và điều khiển. Với tính năng truyền thông đa chủ, khả năng truyền dữ liệu từ xa và sự chính xác, CAN đã trở thành một lựa chọn phổ biến cho nhiều ứng dụng khác nhau, từ ô tô, xe máy đến các thiết bị công nghiệp và hệ thống điều khiển tự động.
Tuy nhiên, để sử dụng CAN hiệu quả, các nhà thiết kế và kỹ sư cần phải hiểu rõ các tính năng và quy định của giao thức này. Việc tuân thủ các tiêu chuẩn và quy định sẽ giúp đảm bảo tính ổn định và độ tin cậy của hệ thống truyền thông.
Chúng ta hy vọng rằng bài viết này đã cung cấp cho bạn những kiến thức cơ bản về giao thức CAN và giúp bạn hiểu rõ hơn về vai trò của nó trong các hệ thống điện tử và điều khiển hiện đại.






